
|
|
1 年之前 | |
|---|---|---|
| .. | ||
| tests | 1 年之前 | |
| tf | 1 年之前 | |
| utils | 1 年之前 | |
| README.md | 1 年之前 | |
| __init__.py | 1 年之前 | |
| dreamerv3.py | 1 年之前 | |
| dreamerv3_catalog.py | 1 年之前 | |
| dreamerv3_learner.py | 1 年之前 | |
| dreamerv3_rl_module.py | 1 年之前 | |
README.md
DreamerV3
Overview
An RLlib-based implementation of the DreamerV3 model-based reinforcement learning algorithm by D. Hafner et al. (Google DeepMind) 2023, in TensorFlow/Keras.
This implementation allows scaling up training by using multi-GPU machines for neural network updates (see below for tips and tricks, example configs, and command lines).
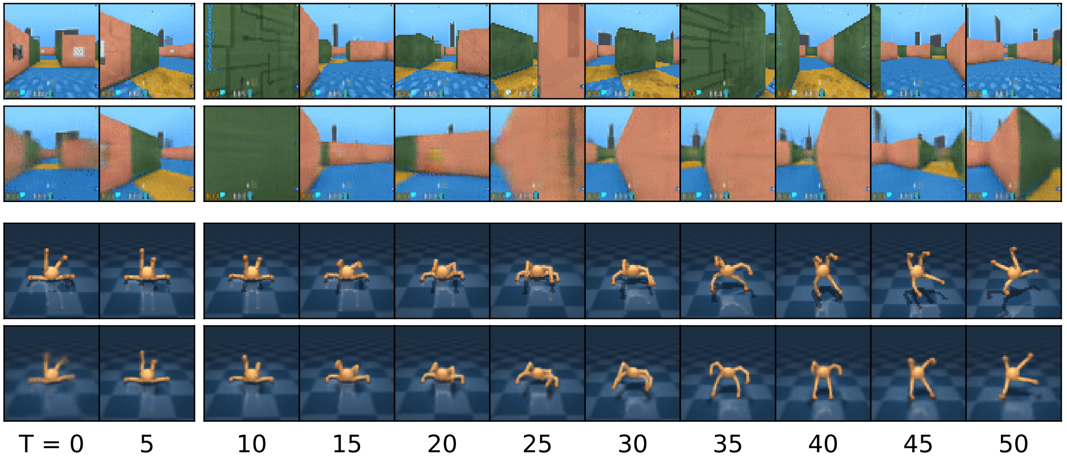
DreamerV3 trains a world model in supervised fashion using real environment interactions. The world model's objective is to correctly predict all aspects of the transition dynamics of the RL environment, which includes predicting the correct next environment state, received rewards, as well as a boolean episode continuation flag. Just like in a standard policy gradient algorithm (e.g. REINFORCE), the critic tries to predict a correct value function and the actor tries to come up with good actions choices that maximize accumulated rewards over time. However, both actor and critic are never trained on real environment data, but solely on dreamed trajectories produced by the world model.
For more specific details about DreamerV3 architecture and math refer to the original paper (see below for all references).
Note on Hyperparameter Tuning for DreamerV3
DreamerV3 is an extremely versatile and stable algorithm that not only works well on different action- and observation spaces (i.e. discrete and continuous actions, as well as image and vector observations) and reward functions (sparse or dense), but also has very little hyperparameters that require tuning.
All you need is a simple "model size" setting (from "XS" to "XL") and a value for the training ratio, which specifies how many steps to replay from the buffer for a training update vs how many steps to take in the actual environment.
For examples on how to set these config settings within your DreamerV3Config objects,
see below.
Example Configs and Command Lines
Note: For a quick setup guide on how to get started with RLlib, refer to this documentation page here.
Use the config examples and templates in the tuned_examples folder in combination with the following scripts and command lines in order to run RLlib's DreamerV3 algorithm in your experiments:
Atari100k
$ cd ray/rllib
$ rllib train file tuned_examples/dreamerv3/atari_100k.py --env ALE/Pong-v5
DeepMind Control Suite (vision)
$ cd ray/rllib
$ rllib train file tuned_examples/dreamerv3/dm_control_suite_vision.py --env DMC/cartpole/swingup
Other --env options for the DM Control Suite would be --env DMC/hopper/hop, --env DMC/walker/walk, etc..
Note that you can also switch on WandB logging with the above script via the options
--wandb-key=[your WandB API key] --wandb-project=[some project name] --wandb-run-name=[some run name]
Running DreamerV3 with arbitrary Envs and Configs
Can I run DreamerV3 with any gym or custom environments? Yes, you can!

Let's try the Flappy Bird gymnasium env. It's image space is a cellphone-style
288 x 512 RGB, very different from DreamerV3's Atari benchmark norm (which is 64x64 RGB).
So we will have to custom-wrap observations to resize/normalize FlappyBird's Box(0, 255, (288, 512, 3), f32)
space into a new Box(-1, 1, (64, 64, 3), f32).
First we quickly install flappy_bird_gymnasium in our dev environment:
$ pip install flappy_bird_gymnasium
Now, let's create a new python file for this RLlib experiment and call it flappy_bird.py:
from ray import tune
from ray.rllib.algorithms.dreamerv3.dreamerv3 import DreamerV3Config
def _env_creator(ctx):
import flappy_bird_gymnasium # doctest: +SKIP
import gymnasium as gym
from supersuit.generic_wrappers import resize_v1
from ray.rllib.algorithms.dreamerv3.utils.env_runner import NormalizedImageEnv
return NormalizedImageEnv(
resize_v1( # resize to 64x64 and normalize images
gym.make("FlappyBird-rgb-v0", audio_on=False), x_size=64, y_size=64
)
)
# Register the FlappyBird-rgb-v0 env including necessary wrappers via the
# `tune.register_env()` API.
tune.register_env("flappy-bird", _env_creator)
# Define the `config` variable to use for training.
config = (
DreamerV3Config()
# set the env to the pre-registered string
.environment("flappy-bird")
# play around with the insanely high number of hyperparameters for DreamerV3 ;)
.training(
model_size="S",
training_ratio=1024,
)
)
# Run the tuner job.
results = tune.Tuner(trainable="DreamerV3", param_space=config).fit()
Great! Now, let's run this experiment:
$ python flappy_bird.py
This should be it. Feel free to try out running this on multiple GPUs using these more advanced config examples here (Atari100k) and here (DM Control Suite). Also see the notes below on good recipes for running on multiple GPUs.
IMPORTANT: DreamerV3 out-of-the-box only supports image observation spaces of
shape 64x64x3 as well as any vector observations (1D float32 Box spaces).
Should you require a special world model encoder- and decoder for other observation
spaces (e.g. a text embedding or images of other dimensions), you will have to
subclass DreamerV3's catalog class and then configure this
new catalog via your DreamerV3Config object as follows:
from ray.rllib.algorithms.dreamerv3.tf.dreamerv3_tf_rl_module import DreamerV3TfRLModule
from ray.rllib.core.rl_module.rl_module import SingleAgentRLModuleSpec
config.rl_module(
rl_module_spec=SingleAgentRLModuleSpec(
module_class=DreamerV3TfRLModule,
catalog_class=[your DreamerV3Catalog subclass],
)
)
Note on multi-GPU Training with DreamerV3
We found that when using multiple GPUs for DreamerV3 training, the following simple adjustments should be made on top of the default config.
- Multiply the batch size (default
B=16) by the number of GPUs you are using. Use theDreamerV3Config.training(batch_size_B=..)API for this. For example, for 2 GPUs, use a batch size ofB=32. - Multiply the number of environments you sample from in parallel by the number of GPUs you are using.
Use the
DreamerV3Config.rollouts(num_envs_per_worker=..)for this. For example, for 4 GPUs and a default environment count of 8 (the single-GPU default for this setting depends on the benchmark you are running), use 32 parallel environments instead. - Roughly use learning rates that are the default values multiplied by the square root of the number of GPUs.
For example, when using 4 GPUs, multiply all default learning rates (for world model, critic, and actor) by 2.
- Additionally, a "priming"-style warmup schedule might help. Thereby, increase the learning rates from 0.0 to the final value(s) over the first ~10% of total env steps needed for the experiment.
- For examples on how to set such schedules within your
DreamerV3Config, see below. - See here for more details on learning rate "priming".
Results
Our results on the Atari 100k and (visual) DeepMind Control Suite benchmarks match those reported in the paper.
Pong-v5 (100k) 1GPU vs 2GPUs vs 4GPUs

Atari 100k

DeepMind Control Suite (vision)

References
For more algorithm details, see the original Dreamer-V3 paper:
[1] Mastering Diverse Domains through World Models - 2023 D. Hafner, J. Pasukonis, J. Ba, T. Lillicrap
.. and the (predecessor) Dreamer-V2 paper:
[2] Mastering Atari with Discrete World Models - 2021 D. Hafner, T. Lillicrap, M. Norouzi, J. Ba